
Модель шагохода
Уже много лет ученые и конструкторы разных стран занимаются разработкой конструкции шагающих машин и их механизмов. Но как технически осуществить принцип движения, заимствованный у природы? И не рано ли прощаться с колесом, столько веков верно служившим человеку?
Оказывается, нет. Колеса остаются колесами. Они незаменимы при больших скоростях на дорогах с плотным покрытием. Но в труднопроходимых местах - по сыпучему песку и глубокому снегу - колеса бессильны. Вот здесь-то на помощь человеку и могут прийти шагающие машины. Да и не только здесь, на Земле. Представьте себе, что на другую планету отправляется научная экспедиция. Ей не обойтись без вездехода, машины, которая сможет постепенно, шаг за шагом двигаться по бескрайним районам неизвестной планеты и передавать исчерпывающую информацию на станцию.
Построив модель шагающей машины, вы тоже сможете присоединиться к инженерам-испытателям, работающим над этой проблемой. Попробуйте и вы ответить на вопрос: что лучше и практичнее в трудных условиях неисследованной планеты - шагающая машина или колесный вездеход?
Шагающие механизмы строят давно. Еще в прошлом веке известный русский математик П. Л. Чебышев разработал и построил оригинальный механизм, который можно смело назвать шагающим. Идея Чебышева использована в приведенной здесь модели, которую разработал Г. Либерт.
Кривошип механизма OA (рис. 100) равномерно вращается вокруг точки O. С кривошипом через шарнир связана "нога" AC, к средней части которой тоже на шарнире подсоединена пластина EB. Второй конец этой пластины может вращаться вокруг точки E. При вращении кривошипа "нога" перемещается по эллипсоидной траектории и делает шагающее движение. В определенной точке "нога" опирается на землю, приподнимает корпус модели и переносит его вперед на некоторое расстояние, затем она отрывается от земли и перемещается вперед для очередного шага.
Размеры деталей шагающего механизма OA=8 мм, EB=AB=BC=20 мм, EO=16 мм.
Для того чтобы модель хорошо сохраняла устойчивость, она должна опираться как минимум на три точки. Поэтому в модели применены три моста, каждый с двумя "ногами". Три "ноги", опираясь на землю, переносят корпус модели вперед, а остальные "ноги" в это время перемещаются по воздуху. Кривошипы каждого моста смещены на 180° относительно друг друга. Поэтому при движении одной "ноги" вперед вторая идет назад.
Все мосты приводятся в движение ведущей осью 11 через червячную передачу 18. Сама же ось 11 связана тоже червячной передачей 19 с приводом от электродвигателя 9. Общее передаточное отношение рассчитывается так, чтобы коленчатый вал 6 мог вращаться с частотой 60 мин-1.
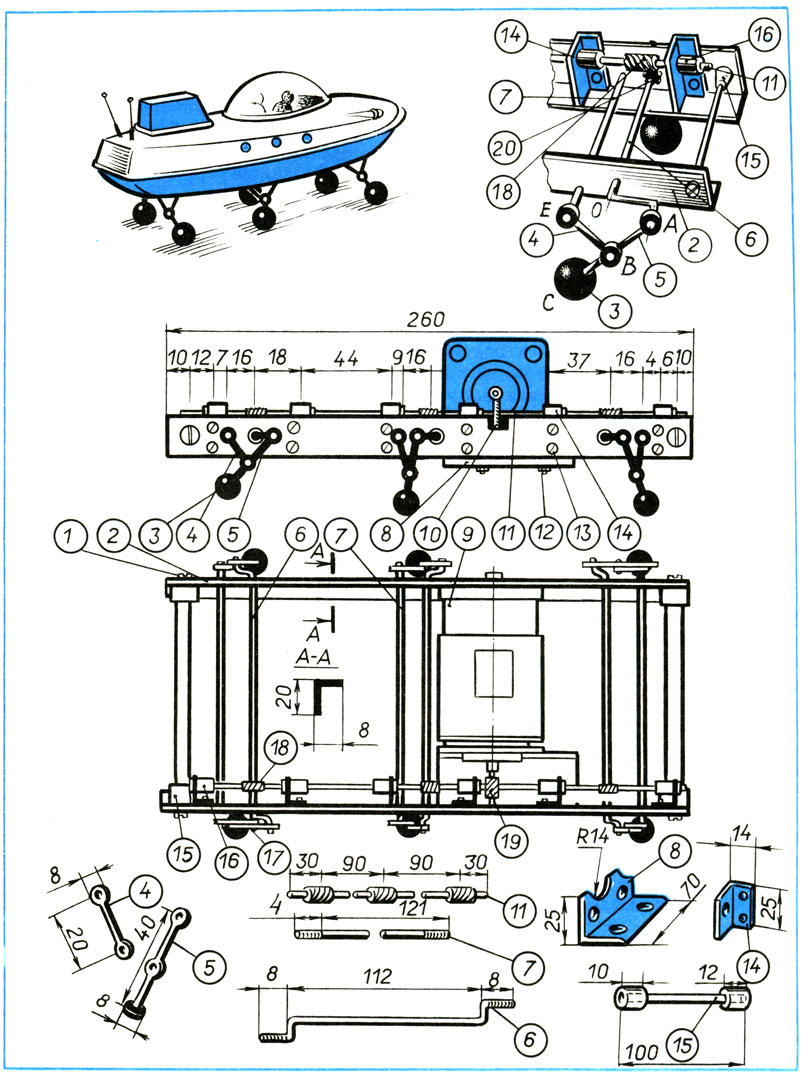
Рис. 100. Шагающая модель Г. Либерта
Ведущая ось с червячными передачами вращается в бронзовых втулках 16, запрессованных в стойках 14. Стойки крепятся винтами 13 к раме 2. В раме вращается ось 7, на концах которой крепятся пластины 4. Рама с двух сторон фиксируется распорками 15 и винтами 1. Изготавливается она из дюралюминиевого уголка 25×25 мм, распорки также дюралюминиевые. Коленчатый вал выгнут из стальной проволоки диаметром 3 мм. Прежде чем сгибать кривошипы, наденьте на коленчатый вал червячное колесо 20. Припаивать его можно после того, как собрана модель и отрегулировано положение кривошипов. Рабочее положение их показано на рисунке. Только при таком расположении мостов модель всегда будет опираться на три точки.
Теперь прикрепите "ногу" 5 к коленчатому валу 6, а пластину 4 к оси 7. Крепление шарнирное - болтами М3, гайками и шайбами. Чтобы модель могла плавно двигаться, снабдите ее "обувью" - шариками 3 из губчатой резины.
Шагающая машина приводится в движение электродвигателем МУ-30. Двигатель 9 крепится к раме уголком 8 и четырьмя винтами 12. Ведущий червяк 19 жестко посажен на валу электродвигателя, а ведомая шестеренка 10 крепится на ведущей оси 11. Подобрать такую готовую ось с тремя червяками 18 вам вряд ли удастся, поэтому ее придется выточить на токарном станке.
Корпус модели спаяйте из жести, а фонарь выгните из оргстекла.
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://pedagogic.ru/ 'Библиотека по педагогике'